ROS2 and PX4 on a drone platform: a case study


In the fast-changing landscape of drone technology, robotics programmers face many choices when selecting a drone platform. Among numerous options, flexibility emerges as a crucial criterion. As part of our R&D programme, we were looking for a drone platform that would provide ample opportunities to modify hardware and software as we wanted to challenge our aerial zone skills and build an accelerator for commercial projects. Let’s explore the process of selecting, upgrading, and customising a drone platform to fulfil our research and development objectives.
The goal of the initiative
The main aim was to deepen our understanding of drone technology and expand our expertise, particularly in integrating autonomous and robotic functionalities into drone platforms. Although our robotics team had already developed similar technologies, we tended to stick to the ground and getting into the air was something we wanted to explore. As such, this research project became an opportunity to build our proficiency in drone systems and discover ways to apply high-level robotics algorithms in a drone.
Our approach was to select an existing drone platform and tackle its customisation capabilities to create an environment for future R&D and commercial projects. This approach allowed us to avoid the high costs and complexities associated with developing a drone from the ground up, allowing our team to implement modifications in software and hardware components that were of interest to us.
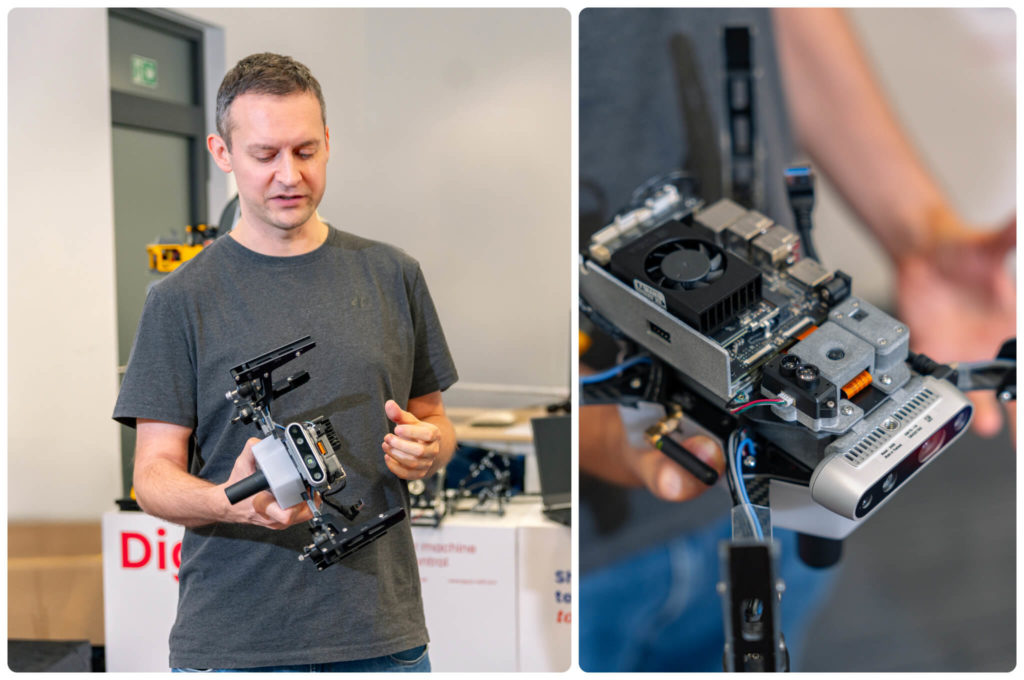
Uvify IFO-S – the most customisable drone platform we have found
A drone platform combines hardware and software to make a drone work and adapt to different tasks. It comprises the physical frame, motors, sensors, computing systems, and primary control and data processing software. This setup allows for easy operation and customisation so developers can configure the drone for specific jobs, such as inspection, mapping, or environmental monitoring.
After researching the available drone platforms, we chose the Uvify IFO-S. The platform’s open architecture sets it apart from competitors with more closed, restrictive models. Many commercial drone platforms limit users’ ability to modify hardware and software components, restricting developers to the manufacturer’s pre-set functions. In contrast, the IFO-S is built with open-source principles, enabling users to adapt the drone for specialised applications by adding custom code, swapping out sensors, or integrating new modules – flexibility that closed platforms typically don’t permit.
Here’s the technical and system specification of the platform at the time we started working on it (June 2024):
- Embedded flight computer: PX4 board
- Companion computer: Jetson Nano
- Radio-Control (RC): NX-6
- Companion computer OS: Ubuntu 18.04
- Distribution on companion computer: ROS1 Melodic

How we upgraded the drone platform
We implemented several changes in hardware and software to improve the IFO-S to support our research objectives.
Transition from Jetson Nano to Jetson Orin Nano
Upgrading the IFO-S platform from the Jetson Nano module to the more powerful Jetson Orin Nano enhanced advanced data processing and algorithm development capabilities. The Jetson Nano, which operates on Linux for Tegra (L4T) based on Ubuntu 18.04 and is equipped with ROS1 Melodic, has served as a solid foundation for various robotic applications. However, the transition to the Jetson Orin Nano represents a significant advancement in processing power and software capabilities.
With the upgrade to Jetson Orin Nano, the system shifts to L4T based on Ubuntu 22.04, enhancing security, system stability, and compatibility with newer software libraries. It also brings increased computational capabilities, as the Orin Nano allows for more complex data processing algorithms to be run in real-time, which is essential for applications like autonomous navigation and obstacle avoidance in dynamic environments.
Upgrading to a more advanced companion computer requires careful consideration of several technical details, especially regarding power supply requirements. Like the initial versions, earlier models operated on a relatively modest 5V input. In contrast, their advanced counterparts need more power inputs to support their enhanced functionalities. When transitioning to a higher-specification model, it is important to note that it operates within a voltage range of 9-19V. This higher voltage increases processing power and meets the energy demands necessary for more intensive computing tasks.
Migration from ROS1 to ROS2
Swapping the Jetson board also opened the door to upgrading the Robot Operating System version from ROS1 Melodic to ROS2 Humble. ROS provides the software infrastructure for managing and processing sensor data, controlling the drone, and enabling autonomous functionality. As ROS1 is nearing its end-of-life (support ends in 2025), the transition seemed to be a natural solution.
ROS2 Humble introduces several enhancements aimed at improving real-time performance through changes in middleware. It also features a more modular and layered architecture and improved security features. These upgrades are essential for creating more robust and scalable drone applications.
With support for the latest versions of Ubuntu and ROS2, the system is well-equipped to integrate future technological advancements and ensure compatibility with upcoming software tools and libraries.
Adding PX4 flight control
Integrating PX4, a leading open-source flight control platform, with the Uvify IFO-S drone provides key benefits in flexibility, customisation, and community support for advanced drone applications. PX4 supports various vehicles and features like waypoint navigation, geofencing, and collision avoidance. Its open-source nature enables continuous improvement and integration with different sensors and hardware. The active developer community ensures ongoing enhancements and adaptability, making PX4 on the IFO-S an excellent choice for innovative drone operations.
The full compatibility of PX4 with the latest ROS2 Humble distributions opens up new possibilities for implementing “on-edge” functionalities in drones, which is essential for advanced research and operational efficiency. This compatibility allows for seamless integration between the drone’s flight control systems and more complex computational tasks typically handled by ROS2, such as real-time data processing, autonomous decision-making, and advanced robotics workflows. As a result, we can deploy more sophisticated algorithms directly on the drone, enhancing capabilities like autonomous navigation, object detection, and environmental interaction without the latency associated with cloud computing. This integration not only improves the efficiency and responsiveness of drone operations but also expands the potential for drones in applications that require real-time, autonomous systems.
Check out our robotics development and consulting services
Learn more
Utilisation of compatibility with QGroundControl
The Uvify IFO-S drone is fully compatible with QGroundControl, a comprehensive open-source software platform that facilitates drone setup, calibration, and operation. Combining QGroundControl with the IFO-S allows us to customise the system and integrate our UI/UX designs. This combination maximises the IFO-S’s potential, making it a reliable and highly adaptable platform for various customer-specific drone operations.
QGroundControl and the IFO-S integrate on several levels:
- Calibration: QGroundControl provides detailed instructions and automated processes for calibrating the IFO-S’s sensors, including gyroscopes, accelerometers, and compasses. This ensures the accurate functioning of the components and reliable drone performance,
- Configuration: The platform allows users to easily adjust flight modes, control settings, and hardware parameters through a user-friendly interface, making the IFO-S adaptable to diverse research and operational needs,
- Mission planning: Users can program precise flight paths, set waypoints, adjust altitudes, and manage camera operations, enabling systematic data collection and accurate manoeuvres in complex environments,
- Real-time monitoring: QGroundControl provides vital flight data in real time, such as speed, altitude, GPS positioning, and battery status. This information is essential for monitoring the IFO-S during missions and ensuring operational success.
To conclude
Through this project, we not only gained valuable insights into drone technology but also established a robust foundation for future R&D and commercial projects. The customised IFO-S platform is now equipped to meet diverse client requirements. With a flexible, open-source foundation, this platform empowers our robotics programmers to innovate and tailor further functionalities and components.
By carrying out this initiative, we’ve become better acquainted with drone tools and technologies, allowing us to engage straight on with commercial projects and be effective from the outset.
Are you building a drone solution?
Our robotics experts are ready to support the development of your drone project. Learn more about our robotics services here or contact us via the form below.
FAQ: Drone platform
The IFO-S offers an open architecture that allows for extensive hardware and software modifications. Unlike many commercial drones with closed systems, it supports open-source development, easy integration with ROS, and compatibility with platforms like PX4 and QGroundControl, making it ideal for R&D work.
The Jetson Orin Nano offers significantly more processing power, enabling complex AI and robotics algorithms to run in real time. It also supports newer software environments (Ubuntu 22.04 and ROS2 Humble), improving stability, performance, and long-term support.
ROS2 provides better real-time performance, improved security, and enhanced modularity. Since ROS1 will reach its end of life in 2025, migrating now ensures that our systems remain compatible with future robotics developments and supported by the open-source community.
PX4 offers powerful open-source flight control capabilities, including waypoint navigation, collision avoidance, and geofencing. Its flexibility and large developer community make it a perfect match for a research-oriented platform that demands adaptability and continuous improvement.
Yes. The platform is designed as a foundation for both internal R&D and client-driven projects. We can adapt it for specific commercial applications and collaborate with organisations looking to accelerate their drone development initiatives.



arrow_circle_rightContact us
Let’s talk how we can develop your drone project

arrow_circle_right Our articles



