From smart farming to autonomous farming: why software is now the bottleneck


The future of autonomous farming will not be defined by new hardware and more powerful farm equipment, but by software maturity. As agriculture transitions from decision-support tools to closed-loop autonomous systems, machines must perceive their environment, make context-aware decisions, execute actions safely, and continuously monitor outcomes. Engineering software that can integrate perception, planning, control, and safety under highly variable field conditions is now the central challenge – and the key to making autonomous technology in farming reliable and scalable.
Autonomy in farming is no longer a hardware problem
Over the last decade, agriculture has progressed rapidly from manual field operations to smart farming. Precision technologies – GNSS guidance, auto-steering, variable-rate application, yield mapping, drones, and in-field sensors – are now standard components of modern agricultural machinery and farming operations.
With the shift toward supervised and fully autonomous agriculture, the industry is fundamentally changing. Machines can already drive, sense, and actuate, thus making software the primary bottleneck to scaling autonomy in agriculture.
Not software in the sense of a single algorithm, but complex, safety-critical, lifecycle-managed autonomy software that must operate reliably in unstructured, variable, and biologically driven environments.
What is autonomous farming?
Autonomous farming refers to agricultural systems in which machines can perceive their environment, make context-aware decisions, and execute tasks with minimal or no direct human input, while remaining within defined safety, operational, and regulatory constraints.
From a machinery OEM or robotics perspective, the key distinction is that smart/ precision farming supports the operator’s decisions, while autonomous farming executes decisions autonomously within a defined Operational Design Domain (ODD).
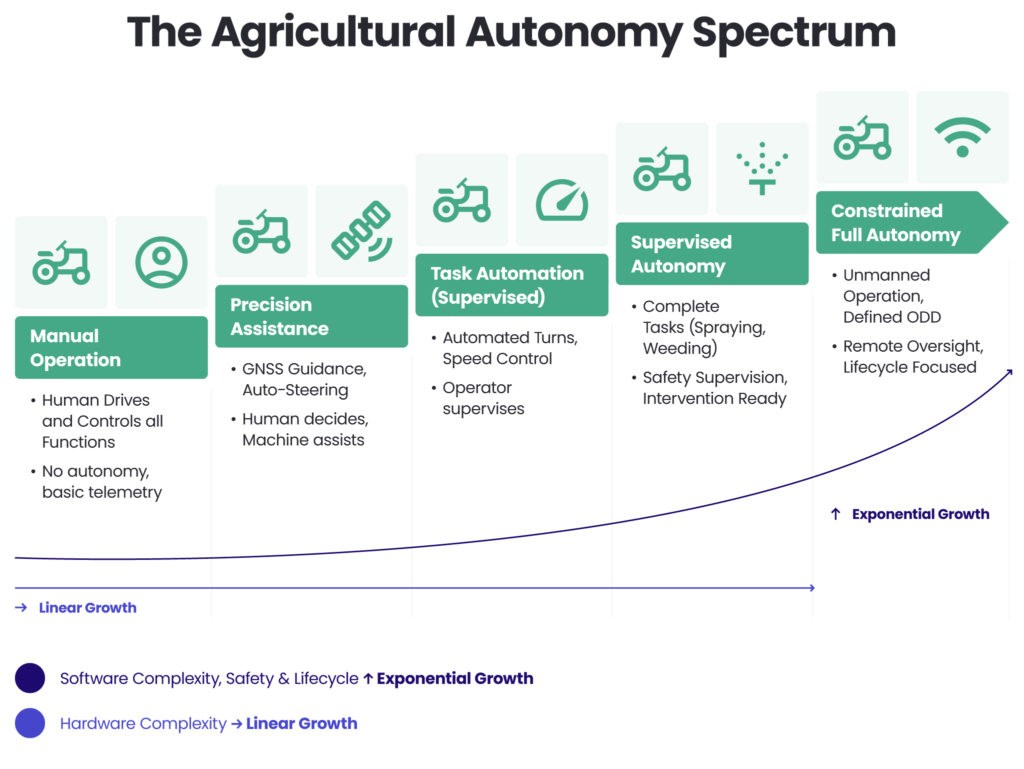
It is worth noting that autonomous farming is not a binary state. It spans a continuum of autonomy levels, typically including:
- Assisted autonomy – the operator remains in control, with automation supporting specific functions (e.g., auto-steering, section control).
- Supervised autonomy – the system performs tasks independently but requires continuous supervision and intervention capability.
- Full autonomy – the system operates independently within a constrained ODD, with remote supervision or exception handling, allowing for minimal human intervention.
Crucially, autonomous farming systems integrate:
- Perception (computer vision, LiDAR, GNSS, IMU, sensor fusion)
- Decision-making (planning, behaviour logic, agronomic constraints)
- Control (vehicle and implement actuation, low-speed control)
- Safety & lifecycle software (monitoring, fallback modes, updates, auditability)
The hardest challenge of autonomous farming is no longer motion or actuation – it is ensuring that the software coordinating these layers behaves and operates safely, predictably, and repeatably under real-world field conditions.
The shift: from tools of greater precision to autonomous systems
Precision agriculture optimised how humans operate machines and other vehicles. Now autonomous farming changes the paradigm by optimising how farm equipment and machines operate themselves, within defined operational constraints. This shift turns “better guidance” into closed-loop autonomy: perception → decision → execution → supervision.
Precision farming systems were designed primarily for decision support, hance they:
- collect farm data,
- visualise insights,
- leave judgment and execution to the operator.
Autonomous agricultural systems strive to close the loop by:
- perceiving the environment in real time,
- deciding what to do next,
- executing actions safely,
- monitoring outcomes and system health,
- repeating continuously.
This transition fundamentally changes system requirements. A tractor following GNSS lines is a control problem. A machine navigating crops health, obstacles, soil conditions and variability, weather or climate changes, and other farm vehicles is a real-time autonomy system. At this stage, agriculture begins to resemble robotics and industrial autonomy, not traditional farm equipment.

Where the real complexity of autonomous systems lives today
Autonomy in agriculture rarely fails because a sensor is missing, a robot cannot move, or existing equipment malfunctions. It fails at the interfaces: when perception uncertainty, control limits, agronomic rules, and safety constraints collide in real field conditions. The complexity, therefore, is not due to a single component – it is the integration and orchestration of many components under uncertain conditions.
Perception is a system, not a model
In agricultural autonomy, perception must:
- work across crops, growth stages, seasons, and regions,
- tolerate dust, vibration, occlusion, and extreme lighting,
- fuse multiple sensors with different failure modes,
- estimate uncertainty and detect perception degradation.
The challenge is not training a detector – it is engineering a perception pipeline that remains reliable across years of operation. This is a software systems problem, not a research problem.
Planning and control are context-driven
Agricultural equipment and machines operate at low speeds but in highly variable environments. Control and decision software must account for:
- terrain and traction variability,
- implement-specific constraints (sprayers, seeders, cutters),
- agronomic rules (crop damage, soil compaction risk, timing constraints),
- interactions with humans, animals, and other machines or farm vehicles.
Unlike automotive autonomy, agricultural autonomy has no universal ODD. Each operation, crop, and geography changes system behaviour. This makes behaviour planning, control tuning, and integration testing dominant sources of risk.
Safety and supervision are core architecture concerns
Real-world agricultural autonomy almost always means supervised autonomy. That’s why systems must be able to:
- detect unsafe or uncertain conditions,
- enter degraded modes,
- hand control back to an operator,
- log decisions and system state for traceability.
These capabilities require explicit software architecture – they cannot be afterthoughts.
Lifecycle software dominates the total cost of ownership
Delivering a working demo is easy compared to operating autonomy across seasons, hardware revisions, and changing conditions. Once autonomy is deployed, the real work begins: monitoring, updates, incident handling, continuous validation, and model lifecycle management. Over time, these lifecycle capabilities become the dominant driver of cost, risk, and customer trust.
Autonomous machines and farm equipment must survive:
- seasonal variability,
- sensor changes and recalibration,
- software updates and feature releases,
- evolving regulations and customer expectations.
This shifts long-term cost and risk toward:
- MLOps and model lifecycle management (drift detection, retraining, evaluation),
- OTA updates and rollback strategies (secure delivery, safe deployment),
- telemetry and observability (fleet monitoring, incident triage),
- simulation, HIL, and regression testing (repeatable verification of behaviour).
Autonomy is a long-lived software product, not a one-time integration.
Why is software now the bottleneck for autonomous technology?
The industry has made major progress on hardware platforms and sensing, but scaling autonomy depends on software reliability and operational maturity. As autonomy expands beyond assisted functions into supervised execution, the required software stack grows non-linearly – especially around safety supervision, validation, and lifecycle. This is why organisations often stall not at prototyping, but at industrialisation.
Across AgiTech startups, robotics companies, and machinery OEM autonomy teams, the same pattern appears:
- Sensors are available
- Actuators are proven
- Algorithms exist
- Proofs of concept work
But scaling autonomy stalls because:
- perception pipelines are fragile under field variation,
- decision logic is hard to generalise across operations and regions,
- safety cases are incomplete or not operationalised,
- lifecycle tooling (monitoring, rollback, testing) is missing,
- operational complexity grows faster than internal teams.
The key question for autonomous tech is no longer “Can the machine do this?” It is “Can we operate this safely, repeatedly, and at scale?” That question is answered by software maturity.
Autonomy as a system-of-systems
Autonomous farming is not a single “autonomy module” that can be bolted onto a machine. It is a system-of-systems where perception, planning, control, safety, cloud services, and fleet lifecycle must behave as one coherent product. That’s why the winners will be the teams that engineer the full stack for integration, verification, and long-term operations.
At Spyrosoft, autonomy is treated as a system-of-systems challenge, spanning:
- perception and sensor fusion,
- planning, behaviour, and control,
- safety supervision and degraded modes,
- edge and cloud software,
- lifecycle, testing, and compliance readiness.
This reflects the reality faced by modern agricultural autonomy programs: the hardest problems emerge at the interfaces between components, not inside individual algorithms.
Software maturity is the new differentiator for autonomous agriculture
As agricultural autonomy becomes real, differentiation shifts from hardware novelty to software maturity: safety, reliability, scalability, and lifecycle operations. The market will reward systems that can be deployed broadly, maintained efficiently, and trusted over years – not just demonstrated once. In autonomous agriculture, the most valuable innovation is the software discipline that makes the whole system repeatable.
Autonomous farming is no longer constrained by farm equipment and hardware innovation. It is constrained by software engineering maturity. This is where you should build your next competitive advantage. So, if you are looking for an experienced engineering team and assistance with your agricultural software endeavours, contact us via the form below or check our AgtiTech offering for more information.
FAQ
Autonomous farming refers to agricultural systems in which machines can perceive their environment, make context-aware decisions, and execute tasks with minimal or no direct human input, while operating within defined safety, regulatory, and operational constraints.
Precision farming supports human decision-making with data and automation tools, while autonomous farming enables machines to make and execute decisions independently within a defined Operational Design Domain (ODD).
Not necessarily. Autonomous farming exists on a continuum that includes autonomy levels such as assisted autonomy, supervised autonomy, and full autonomy within a constrained ODD.
Farm equipment and hardware solutions, such as sensors and actuators, have matured significantly. Currently, the main challenge for autonomous farming is to develop appropriate software that is reliable, safety-critical, and lifecycle-managed, and that also integrates perception, planning, control, and safety in variable real-world conditions.
Perception systems must function across different crops, growth stages, seasons, and regions while tolerating dust, vibration, occlusion, and lighting variability. The challenge is ensuring long-term reliability across years of operation.
Unlike automotive systems, agricultural autonomy has no universal Operational Design Domain. Each crop, farming operation, geography, and season alters system behaviour, increasing the complexity of planning, control tuning, integration, and testing.
Scaling fails due to fragile perception pipelines under variable field conditions, difficulty generalising decision logic across operations and regions, incomplete safety cases, lack of lifecycle tooling, and fast-growing operational complexity compared to slower development of internal teams.
Software maturity – particularly in safety, reliability, scalability, integration, and lifecycle management – is the key differentiator for long-term success.




arrow_circle_rightContact us
Let’s discuss how we can help you with your agritech projects
arrow_circle_right Our articles



